KJ244

Category : Explosion-proof Painting
Series : K Series
Model : KJ244
Payload : 15 Kg
Max. Reach : 2490 mm
Degree of freedom : 6-axes
Supported Controller : E25, E35, E45
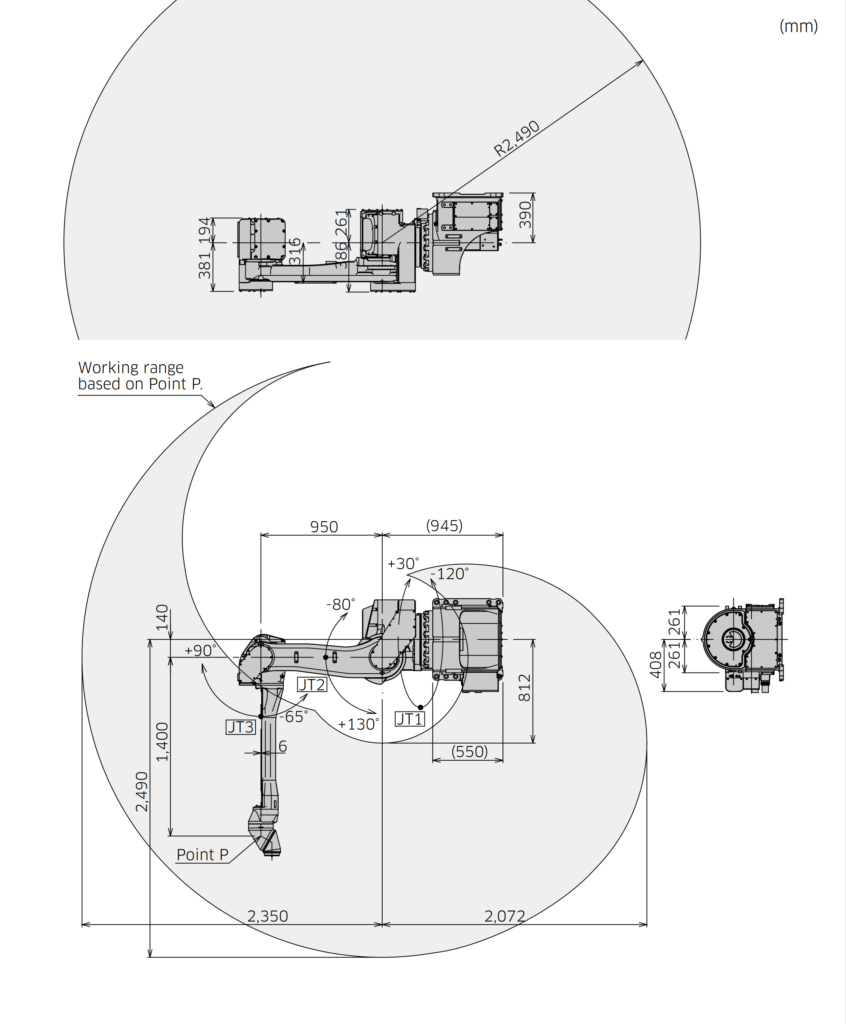
The KJ244 explosion-proof painting robot features a 3R (Roll, Roll, Roll) hollow wrist with inner diameter of 70 mm to accommodate hoses as well as a slim and lighweight body with a wide motion range. Painting equipment can be mounted on the upper arm.
| KJ244 (Floor) - Standard Specifications | ||
|---|---|---|
| Type | Articulated robot | |
| Degree of freedom (axes) | 6 | |
| Payload (kg) | Wrist : 15 Arm : 25 | |
| Max. reach*1 (mm) | 2,490 | |
| Position repeatability*2 (mm) | ±0.5 | |
| Motion range (°) | Arm rotation (JT1) | ±120 |
| Arm out-in (JT2) | +130 ~ -80 | |
| Arm up-down (JT3) | +90 ~ -65 | |
| Wrist swivel (JT4) | ±720 | |
| Wrist bend (JT5) | ±720 | |
| Wrist twist (JT6) | ±410 | |
| Max. painting speed (mm/s) | 1500 | |
| Allowable moment (N·m) | Wrist swivel (JT4) | 56.2 |
| Wrist bend (JT5) | 43.4 | |
| Wrist twist (JT6) | 22.0 | |
| Allowable moment of inertia (kg·m2) | Wrist swivel (JT4) | 2.19 |
| Wrist bend (JT5) | 1.31 | |
| Wrist twist (JT6) | 0.33 | |
| Mass (kg) | 540 | |
| Mounting | Floor | |
| Installation environment | Ambient temperature (°C) | 0 ~ 40 |
| Relative humidity (%) | 35 ~ 85 (No condensation, nor frost allowed) |
|
| Explosion-proof construction | America | Combination of pressurized and intrinsically safe (CL I ZN 1 AEx ib pxb ⅡB T4 / AEx ib IIB T4 Gb) |
| Canada | Combination of pressurized and intrinsically safe (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4 Gb) |
|
| Europe | Combination of pressurized and intrinsically safe (Ⅱ2 G Ex pxb ib ⅡB T4 / Ex ib IIB T4 Gb) |
|
| Korea | Combination of pressurized and intrinsically safe (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4) |
|
| China | Combination of pressurized and intrinsically safe (Ex ib px ⅡB T4 Gb / Ex ib IIB T4 Gb) |
|
| Japan & Asia (Except China & Korea) | Combination of pressurized and intrinsically safe (Expxib ⅡB T4 / Ex ib IIB T4 Gb) |
|
| Power requirements*3 (kVA) | 5 | |
| Controller | America, Canada | E35 |
| Europe | E45 | |
| Japan & Asia | E25 | |
| *1: Distance between centers of JT1 and JT5. *2: Conforms to ISO9283. *3: Depends on payload and motion patterns. |
||
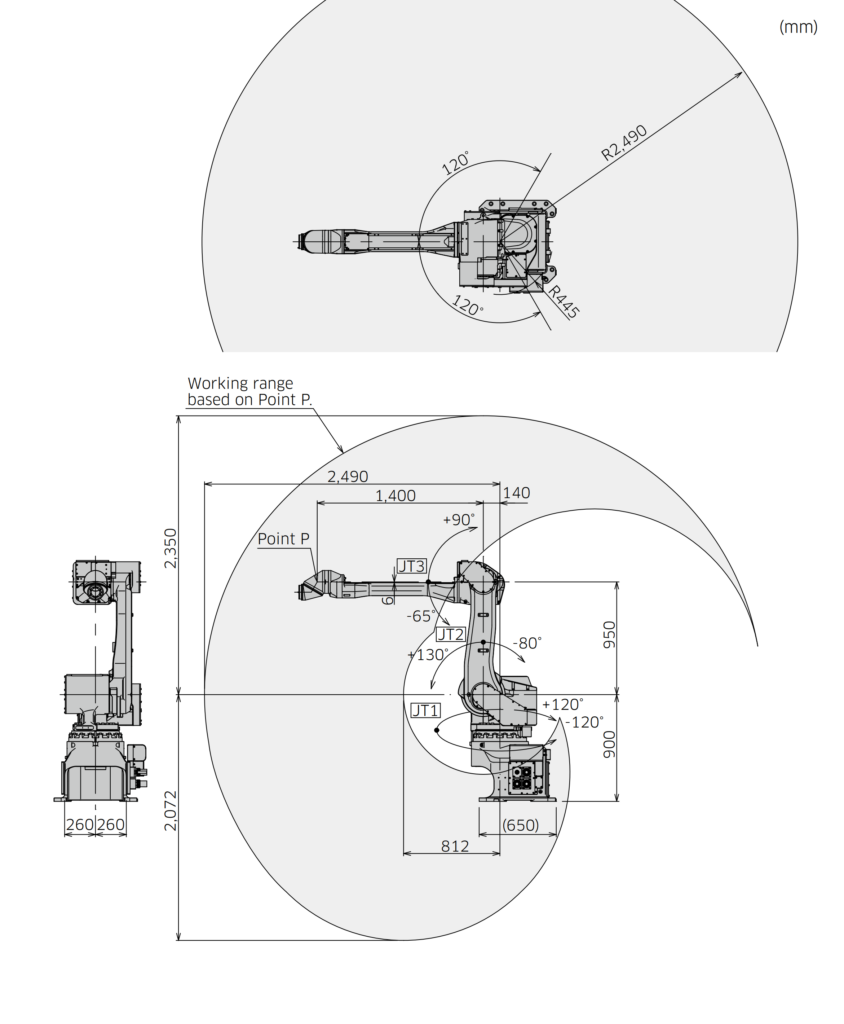
| KJ244 (Shelf) - Standard Specifications | ||
|---|---|---|
| Type | Articulated robot | |
| Degree of freedom (axes) | 6 | |
| Payload (kg) | Wrist : 15 Arm : 25 | |
| Max. reach*1 (mm) | 2,490 | |
| Position repeatability*2 (mm) | ±0.5 | |
| Motion range (°) | Arm rotation (JT1) | ±120 |
| Arm out-in (JT2) | +130 ~ -80 | |
| Arm up-down (JT3) | +90 ~ -65 | |
| Wrist swivel (JT4) | ±720 | |
| Wrist bend (JT5) | ±720 | |
| Wrist twist (JT6) | ±410 | |
| Max. painting speed (mm/s) | 1500 | |
| Allowable moment (N·m) | Wrist swivel (JT4) | 56.2 |
| Wrist bend (JT5) | 43.4 | |
| Wrist twist (JT6) | 22.0 | |
| Allowable moment of inertia (kg·m2) | Wrist swivel (JT4) | 2.19 |
| Wrist bend (JT5) | 1.31 | |
| Wrist twist (JT6) | 0.33 | |
| Mass (kg) | 530 | |
| Mounting | Shelf | |
| Installation environment | Ambient temperature (°C) | 0 ~ 40 |
| Relative humidity (%) | 35 ~ 85 (No condensation, nor frost allowed) |
|
| Explosion-proof construction | America | Combination of pressurized and intrinsically safe (CL I ZN 1 AEx ib pxb ⅡB T4 / AEx ib IIB T4 Gb) |
| Canada | Combination of pressurized and intrinsically safe (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4 Gb) |
|
| Europe | Combination of pressurized and intrinsically safe (Ⅱ2 G Ex pxb ib ⅡB T4 / Ex ib IIB T4 Gb) |
|
| Korea | Combination of pressurized and intrinsically safe (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4) |
|
| China | Combination of pressurized and intrinsically safe (Ex ib px ⅡB T4 Gb / Ex ib IIB T4 Gb) |
|
| Japan & Asia (Except China & Korea) | Combination of pressurized and intrinsically safe (Expxib ⅡB T4 / Ex ib IIB T4 Gb) |
|
| Power requirements*3 (kVA) | 5 | |
| Controller | America, Canada | E35 |
| Europe | E45 | |
| Japan & Asia | E25 | |
| *1: Distance between centers of JT1 and JT5. *2: Conforms to ISO9283. *3: Depends on payload and motion patterns. |
||
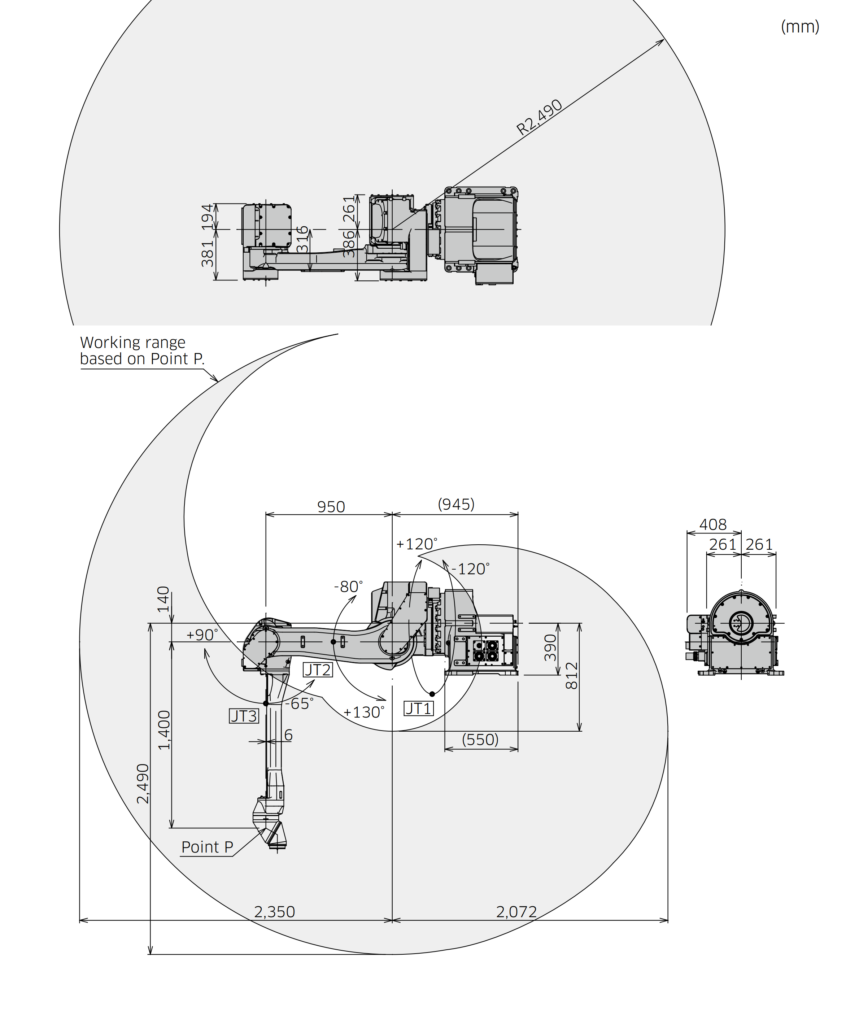
| KJ244 (Wall) - Standard Specifications | ||
|---|---|---|
| Type | Articulated robot | |
| Degree of freedom (axes) | 6 | |
| Payload (kg) | Wrist : 15 Arm : 25 | |
| Max. reach*1 (mm) | 2,490 | |
| Position repeatability*2 (mm) | ±0.5 | |
| Motion range (°) | Arm rotation (JT1) *4 | +120 ~ -30 (Left) / +30 ~ -120 (Right) |
| Arm out-in (JT2) | +130 ~ -80 | |
| Arm up-down (JT3) | +90 ~ -65 | |
| Wrist swivel (JT4) | ±720 | |
| Wrist bend (JT5) | ±720 | |
| Wrist twist (JT6) | ±410 | |
| Max. painting speed (mm/s) | 1500 | |
| Allowable moment (N·m) | Wrist swivel (JT4) | 56.2 |
| Wrist bend (JT5) | 43.4 | |
| Wrist twist (JT6) | 22.0 | |
| Allowable moment of inertia (kg·m2) | Wrist swivel (JT4) | 2.19 |
| Wrist bend (JT5) | 1.31 | |
| Wrist twist (JT6) | 0.33 | |
| Mass (kg) | 530 | |
| Mounting | Wall | |
| Installation environment | Ambient temperature (°C) | 0 ~ 40 |
| Relative humidity (%) | 35 ~ 85 (No condensation, nor frost allowed) |
|
| Explosion-proof construction | America | Combination of pressurized and intrinsically safe (CL I ZN 1 AEx ib pxb ⅡB T4 / AEx ib IIB T4 Gb) |
| Canada | Combination of pressurized and intrinsically safe (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4 Gb) |
|
| Europe | Combination of pressurized and intrinsically safe (Ⅱ2 G Ex pxb ib ⅡB T4 / Ex ib IIB T4 Gb) |
|
| Korea | Combination of pressurized and intrinsically safe (Ex ib pxb ⅡB T4 Gb / Ex ib IIB T4) |
|
| China | Combination of pressurized and intrinsically safe (Ex ib px ⅡB T4 Gb / Ex ib IIB T4 Gb) |
|
| Japan & Asia (Except China & Korea) | Combination of pressurized and intrinsically safe (Expxib ⅡB T4 / Ex ib IIB T4 Gb) |
|
| Power requirements*3 (kVA) | 5 | |
| Controller | America, Canada | E35 |
| Europe | E45 | |
| Japan & Asia | E25 | |
| *1: Distance between centers of JT1 and JT5. *2: Conforms to ISO9283. *3: Depends on payload and motion patterns. *4: Motion range of JT1 varies depending on the direction of the mounting surface. Viewing from the robot backside, when the mounting surface is located on the left, it is [+120 to -30]. When the surface is on the right side, it is [+30 to -120]. |
||