ZX130L

Category : Large
Series : B Series
Model : ZX130L
Payload : 130 Kg
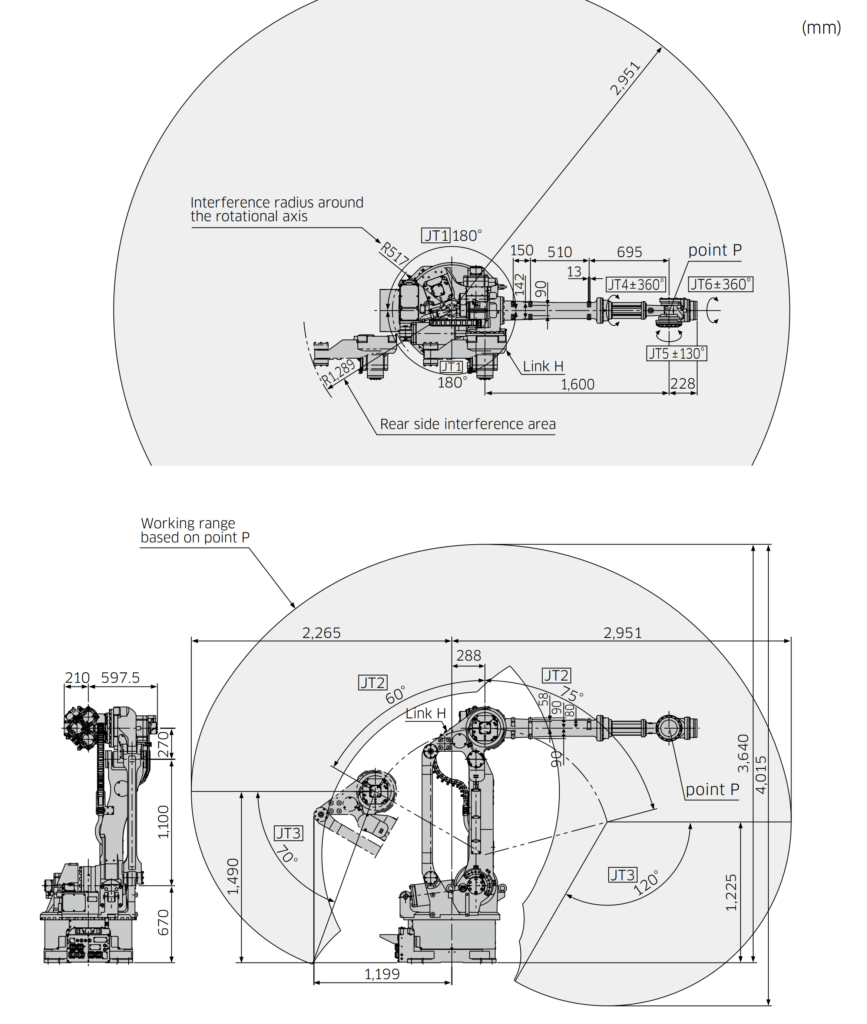
Max. Reach : 2951 mm
Degree of freedom : 6-axes
Supported Controller : F02, E02
The ZX130L robot features a wide working range and long reach. It is suitable for a variety of applications, from spot welding to material handling.
| ZX130L - Standard Specifications | ||
|---|---|---|
| Type | Articulated robot | |
| Degree of freedom (axes) | 6 | |
| Payload (kg) | 130 | |
| Max. reach (mm) | 2,951 | |
| Position repeatability*1 (mm) | ±0.3 | |
| Motion range (°) | Arm rotation (JT1) | ±180 |
| Arm out-in (JT2) | +75 ~ -60 | |
| Arm up-down (JT3) | +250 ~ -120 | |
| Wrist swivel (JT4) | ±360 | |
| Wrist bend (JT5) | ±130 | |
| Wrist twist (JT6) | ±360 | |
| Max. speed (°/s) | Arm rotation (JT1) | 110 |
| Arm out-in (JT2) | 110 | |
| Arm up-down (JT3) | 110 | |
| Wrist swivel (JT4) | 140 | |
| Wrist bend (JT5) | 135 | |
| Wrist twist (JT6) | 230 | |
| Allowable moment (N·m) | Wrist swivel (JT4) | 735 |
| Wrist bend (JT5) | 735 | |
| Wrist twist (JT6) | 421 | |
| Allowable moment of inertia (kg·m2) | Wrist swivel (JT4) | 51.9 |
| Wrist bend (JT5) | 51.9 | |
| Wrist twist (JT6) | 27.4 | |
| Mass (kg) | 1,400 | |
| Mounting | Floor | |
| Installation environment | Ambient temperature (°C) | 0 ~ 45 |
| Relative humidity (%) | 35 ~ 85 (No condensation, nor frost allowed) |
|
| Controller / Power requirements | F02 / 7.5kVA E02 / 7.5kVA |
|
| *1: Conforms to ISO9283 | ||